|
Hi!! I am a final-year undergraduate student at Tsinghua University. I am currently a visiting researcher at Harvard, advised by Prof. Yilun Du. I was fortunate to collaborate with Prof. Gao Huang, Dr. Jiangmiao Pang and Prof. Guanya Shi throughout my undergraduate studies. I want to fundamentally understand how human intelligence works and how we can build machines that learn and think like humans. To this end, I aim to work on general-purpose decision-making agents that can interact, learn, and adapt in our complex physical world. I see robotics as an ideal testbed for such agents, as it requires the deep integration of perception, reasoning, and action in the real world. I draw inspiration from cognitive neuroscience and philosophical perspectives on knowledge and mind in my research. Beyond my research interests, I am also passionate about liberal arts, history, and sociology. I've been playing the piano for about ten years and am a big fan of Western classical music, with Beethoven and Mahler being my favorite. I also enjoy traveling and photography. I am applying for a PhD position in 2026 Fall. Feel free to reach out if you are interested in my research or just want to chat!Google Scholar | Github | Twitter | Email |

Gao Jiawei 「髙 嘉偉」 |
|
|

|
Tairan He*, Jiawei Gao*, Wenli Xiao*, Yuanhang Zhang*, Zi Wang, Jiashun Wang, Zhengyi Luo, Guanqi He, Nikhil Sobanbab, Chaoyi Pan, Zeji Yi, Guannan Qu†, Kris Kitani†, Jessica Hodgins†, Linxi "Jim" Fan†, Yuke Zhu†, Changliu Liu†, Guanya Shi† RSS 2025. [Project Page] [arXiv] [Code] [BibTeX] TLDR: ASAP enables agile, whole-body humanoid motion control by using data to align simulation with real-world physics. |

|
Jiawei Gao*, Ziqin Wang*, Zeqi Xiao, Jingbo Wang, Tai Wang, Jinkun Cao, Xiaolin Hu†, Si Liu†, Jifeng Dai†, Jiangmiao Pang† NeurIPS 2024 Spotlight. [Project Page] [arXiv] [Code] [BibTeX] TLDR: CooHOI is a framework for cooperative object transportation tasks involving multiple humanoid characters, inspired by how humans learn to collaborate through implicit communication. |
|
Junfeng Long*, Zirui Wang*, Quanyi Li, Jiawei Gao, Liu Cao, Jiangmiao Pang† ICLR 2024. [Project Page] [arXiv] [Code] [BibTeX] TLDR: HIMLoco enables quadruped robots to adapt to various terrains by learning to estimate environmental disturbances online both explicitly and implicitly. |
|
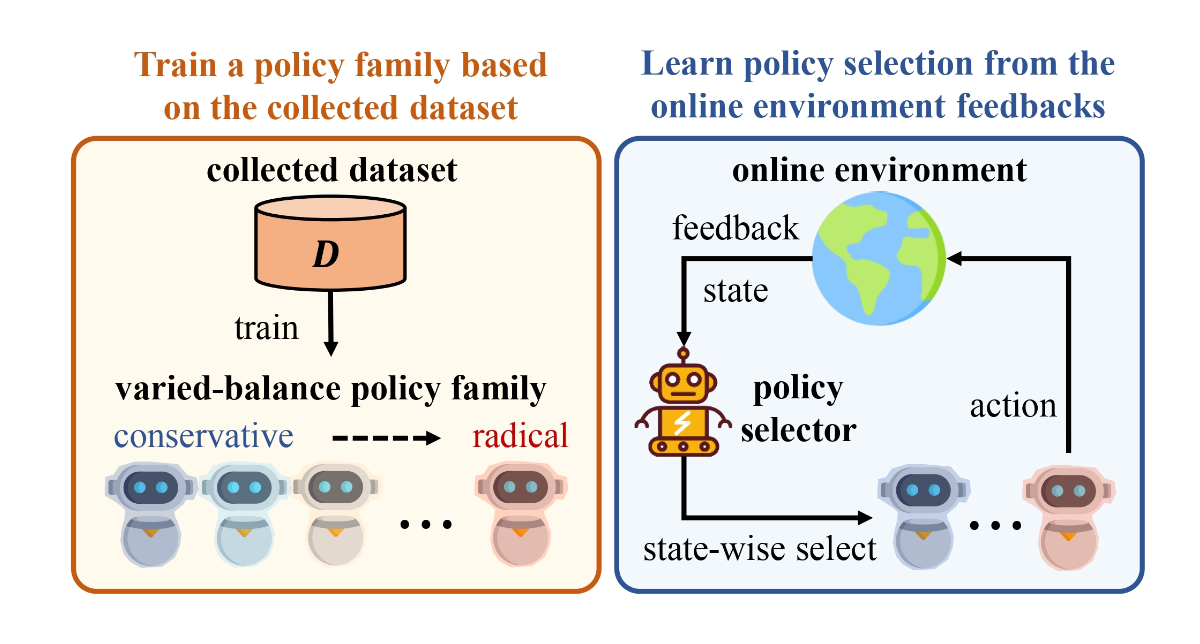
Shenzhi Wang*, Qisen Yang*, Jiawei Gao, Matthieu Lin, Hao Chen, Liwei Wu, Ning Jia, Shiji Song†, Gao Huang† NeurIPS 2023 Spotlight. [Project Page] [arXiv] [Code] [BibTeX] TLDR: FamO2O is a framework for offline-to-online reinforcement learning algorithms that determines state-adaptive improvement-constraint balances. |
|
|
|
Team-lead and Core Contributor. [Code] HumanoidVerse supports multiple simulators and tasks for humanoid robot sim-to-real learning. A key design philosophy is the separation and modularization of simulators, tasks, and algorithms, allowing for conviniently switching between simulators and tasks, and develop new ones with minimal efforts. |
|
Founder, Team-lead and Core Contributor. [Project Page] OpenDA is a platform for students to share their notes, experiences, insights, and advice from the courses they took during their undergraduate studies. We hope this can help bridge the "information gap" in undergraduate studies and promote greater educational equity. |
|
|
|
Recipent for Academic Excellence Scholarship, 2023. Tsinghua University.
Recipent for Outstanding Scientific and Technological Innovation Scholarship, 2023. Tsinghua University. |
|
|
|
In high school, I competed in the Physics Olympiad because I've always loved how physics helps us understand the world in a deeper and more fundamental way. I'm also really interested in cognitive science and psychology--they're great for learning more about who we are, as humans, and I am so curious about how our mind learns so much from so little. I believe that curiosity, resilience, and the unwavering pursuit of self-emancipation are among the most precious qualities of humanity. I strongly favor the quotes by Max Weber: "Man would not have attained the possible unless time and again he had reached out for the impossible. But to do that a man must be a leader, and not only a leader but a hero as well, in a very sober sense of the word." |
|
Updated at November, 2025.
|